摘 要:本文通過對(duì)兩臺(tái) FANUC 數(shù)控機(jī)床進(jìn)行改造���,與 ABB 機(jī)器人組成數(shù)控加工的生產(chǎn)線。生產(chǎn)線中由 PLC 控制機(jī)器人在導(dǎo)軌上來回運(yùn)動(dòng)于兩臺(tái)數(shù)控機(jī)床之間上下料���,并把加工好的工件進(jìn)行碼垛���。實(shí)現(xiàn)了工件自動(dòng)裝卸與加工成品碼垛擺放,提高了數(shù)控加工產(chǎn)品的精度與效率��。
關(guān)鍵詞:工業(yè)機(jī)器人編程���;PLC 編程�����;數(shù)控機(jī)床生產(chǎn)線
隨著制造業(yè)的不斷發(fā)展��,制造業(yè)中引入了機(jī)器人技術(shù)����,使得產(chǎn)品質(zhì)量在精度與穩(wěn)定性上都有了很大的提高���,也大大緩解了對(duì)大量熟練工人需求缺口��。為企業(yè)提高了生產(chǎn)效率���,節(jié)省了人工成本與加工成本�����,也提高了企業(yè)的競(jìng)爭(zhēng)力����。本文以如何構(gòu)建數(shù)控機(jī)床加工與機(jī)器人組成的智能生產(chǎn)線為例�,論述生產(chǎn)線的組建與在生產(chǎn)中的應(yīng)用方面作出初步的探討與研究。
1�����、 生產(chǎn)線的組成與布局
本文所述的生產(chǎn)線由兩臺(tái) FANUC 數(shù)控車床�、ABB 機(jī)器人���、機(jī)器人導(dǎo)軌�����、放料臺(tái)���、PLC 設(shè)備組成�����。兩臺(tái)數(shù)控車床并排排列�,機(jī)床 #1 旁邊放在上料臺(tái)����,機(jī)床 #2 旁邊放置下料臺(tái),兩臺(tái)機(jī)床前面放置機(jī)器人導(dǎo)軌����,機(jī)器人放置在工作臺(tái)上。
2 �����、生產(chǎn)線工作原理
首先 PLC 控制機(jī)器人在導(dǎo)軌上回零點(diǎn)��,然后去取料等待點(diǎn)�,等待放料臺(tái)的物料到達(dá)位置信號(hào)后,機(jī)器人到達(dá)取料點(diǎn)���,機(jī)器人取料�,取料后等待數(shù)控機(jī)床 #1 自動(dòng)開啟機(jī)床門����,張開機(jī)床液壓卡盤�,機(jī)器人放料進(jìn)入卡盤���,卡盤自動(dòng)夾緊��,機(jī)器人松開物料并撤出機(jī)床范圍�����,機(jī)床門關(guān)閉����,機(jī)床啟動(dòng)自動(dòng)加工�����,機(jī)器人等待自動(dòng)加工完成�����,機(jī)床加工完成后機(jī)床門自動(dòng)打開����,機(jī)器人進(jìn)入機(jī)床里面夾住半成品工件,機(jī)床卡盤松開�����,機(jī)器人帶著物料撤出機(jī)床范圍�,PLC 控制機(jī)器人運(yùn)行到機(jī)床 #2 放料處,等待 2 號(hào)機(jī)床打開機(jī)床門����,重復(fù)以上 1 號(hào)機(jī)床的所實(shí)施的動(dòng)作,最后把加工完成的工件通過碼垛方式擺放好工件����。
3、 數(shù)控車床改造
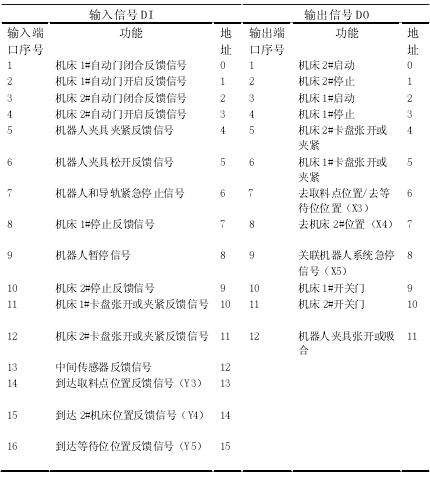
本例中數(shù)控車床沒有液壓控制開關(guān)門裝置�����,需要加裝液壓置�,控制機(jī)床的門開關(guān)功能。由于機(jī)床要與機(jī)器人進(jìn)行通信��,需要從機(jī)器人的 I/O 板接口接線到機(jī)床系統(tǒng)以控制機(jī)床的門的開關(guān)��、夾具的松緊、機(jī)床的啟動(dòng)����、機(jī)床的停止等功能。要對(duì)機(jī)床進(jìn)行接線改造���,具體的接線參考表 1 所示��。
4���、 PLC 控制機(jī)器人在導(dǎo)軌上運(yùn)行
由于兩臺(tái)數(shù)控機(jī)床尺寸較大,機(jī)器人在固定位置難以服務(wù)于兩臺(tái)機(jī)床的上下料��,需要添加導(dǎo)軌����,通過 PLC 控制機(jī)器人在導(dǎo)軌上運(yùn)行,以達(dá)到服務(wù)于兩臺(tái)機(jī)床的目的���。
表 1 機(jī)器人輸入信號(hào) DI 與輸出信號(hào) DO 與地址分布
如圖 1 所示,PLC 控制機(jī)器人運(yùn)動(dòng)����,開始時(shí)候,位機(jī)器人在任意位置 A 點(diǎn)�,首先控制機(jī)器人返回導(dǎo)軌原點(diǎn)���,接著機(jī)器去到取料等待點(diǎn)位置等待取料,物料準(zhǔn)備好后����,發(fā)出信號(hào),機(jī)器人去到取料點(diǎn)進(jìn)行取料并等待機(jī)床 #1 打開機(jī)床門放料進(jìn)入機(jī)床��,放
好物料后等待機(jī)床 #1 加工完成��,機(jī)器人取出機(jī)床半成品���,去到D 點(diǎn)機(jī)床 2# 放料點(diǎn)�����,完成一個(gè)加工周期�����。
編輯以上動(dòng)作的 PLC 控制程序�����,需要用到 FX1N 系列 PLC編程�,使用 FX1N 的簡(jiǎn)易定位控制指令來實(shí)現(xiàn)。本文用到簡(jiǎn)易定位控制指令中的原點(diǎn)回歸 FNC156 (ZRN)��、絕對(duì)位置控制FNC158(DRVA)兩種����。
圖 1 PLC 控制機(jī)器人運(yùn)動(dòng)的位置圖
4.1 原點(diǎn)回歸指令 ZRN。當(dāng)可編程控制器斷電時(shí)會(huì)消失��,因此上電時(shí)和初始運(yùn)行時(shí)�����,必須執(zhí)行原點(diǎn)回歸���,將機(jī)械動(dòng)作的原點(diǎn)位置的數(shù)據(jù)事先寫入��。
① S1 : 指定原點(diǎn)回歸開始的速度�����。② S2 :爬行速度���。③S3 :指定近點(diǎn)信號(hào)輸入。④ D:指定有脈沖輸出的 Y 編號(hào)(僅限于 Y000 或 Y001)�。
4.2 絕對(duì)位置控制指令 DRVA 。以絕對(duì)驅(qū)動(dòng)方式執(zhí)行單速位置控制的指令���。
① S1:輸出脈沖數(shù)��。② S2:輸出脈沖頻率�����。③D1 :脈沖輸出地址�,指令僅能用于 Y000����、Y001。④D2 :旋轉(zhuǎn)方向信號(hào)輸出地址���。
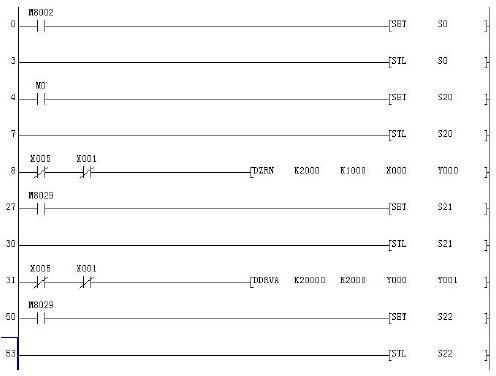
根據(jù)以上分析與指令應(yīng)用��,PLC 控制程序編寫(截取部分程序)如圖 2:程序中 X005 是機(jī)器人急停按鈕����,X001 為導(dǎo)軌急停按鈕��。第 8 行為返回零點(diǎn),第 31 行為去取料等待點(diǎn)����。
圖 2 PLC 控制機(jī)器人導(dǎo)軌運(yùn)行程序
5 、機(jī)器人編程
5.1 DI 與 DO 信號(hào)設(shè)置
為了后面程序的編輯�����,首先要設(shè)置好 I/O 通信��。本例使用的機(jī)器人自帶 ABB 標(biāo)準(zhǔn) I/O 板 DSQC652���,有 16 個(gè)數(shù)字信號(hào)輸出接口與 16 個(gè)數(shù)字信號(hào)輸入接口��。具體接線參考機(jī)器人輸入信號(hào) DI 與輸出信號(hào) DO 與地址分布表 1����,其中輸入信號(hào)端口 14�����、15���、16 接入到 PLC 的輸出端口�����,輸出端口 7 接入到 PLC 的輸入端口�,以控制機(jī)器人在導(dǎo)軌上的運(yùn)行�����。在示教器上設(shè)置輸入輸出信號(hào)時(shí)候��,可根據(jù)表 1 所示接好的線設(shè)置從 DI1-DI16 的輸入信號(hào)與 DO1-DO12 的輸出信號(hào)�����。
5.2 程序編寫
為了便于對(duì)程序的管理與調(diào)試���,可把程序分成幾個(gè)例行程序���。分別為主程序,夾取物料程序��,物料裝夾到機(jī)床程序��,機(jī)床運(yùn)行加工程序���,工件放置程序�����,中斷程序����。其中中斷程序主要用來應(yīng)對(duì)緊急情況的處理,一旦出現(xiàn)程序錯(cuò)誤或者信號(hào)異常情況�����,機(jī)器人馬上跳轉(zhuǎn)到中斷程序里���,作出相應(yīng)的緊急處理��,以確保生產(chǎn)的安全��。
5.3 機(jī)器人坐標(biāo)點(diǎn)選取
上料臺(tái)與下料臺(tái)的物料與產(chǎn)品成品都需要規(guī)則排列�。上料時(shí)候機(jī)器人可分別對(duì)各物料的位置進(jìn)行定位抓取�����,也可以通過碼垛編程方式進(jìn)行定位抓取����。完成加工后也可以以同樣方式進(jìn)行放置成品�����。機(jī)器人工作時(shí)候需要找到合適的坐標(biāo)點(diǎn)�����,坐標(biāo)點(diǎn)選取直接影響到上料的精確度與產(chǎn)品加工的精度,同時(shí)也要避免機(jī)器人與機(jī)床的碰撞����。
通過上述步驟,在示教器把程序編輯完成后���,要先運(yùn)行調(diào)試�,檢測(cè)程序運(yùn)行情況�,是否達(dá)到預(yù)期效果,調(diào)試完后方可以投入到真正的加工生產(chǎn)中去�����。
結(jié)束語
本文以如何構(gòu)建數(shù)控機(jī)床加工與機(jī)器人組成的生產(chǎn)線為例��,探討生產(chǎn)線的組建與在生產(chǎn)中機(jī)器人編程的技巧。實(shí)現(xiàn)了數(shù)控加工智能化���,使得數(shù)控加工變得簡(jiǎn)單而不再勞累����。提高了數(shù)控加工的安全性與產(chǎn)品的質(zhì)量��,也提高了生產(chǎn)效率����,降低了加工成本。




.png)
