摘要:狀態(tài)監(jiān)測和故障預(yù)測技術(shù)是數(shù)控機(jī)床實(shí)現(xiàn)自主保障的一項(xiàng)關(guān)鍵技術(shù)�,首先提出了狀態(tài)監(jiān)測和故障預(yù)測維修的組成及功能����,構(gòu)建了數(shù)控機(jī)床維修系統(tǒng)的功能框圖并分析了其工作流程�����;接著闡述了故障診斷與預(yù)測的具體實(shí)施結(jié)構(gòu)體系����,該結(jié)構(gòu)能夠?qū)崿F(xiàn)大型數(shù)控機(jī)床狀態(tài)監(jiān)測和故障預(yù)測��,為提高數(shù)控機(jī)床的使用壽命及使用效率����,具有重要的推廣價值;最后總結(jié)了如何開發(fā)適合我國國情的狀態(tài)監(jiān)測與故障預(yù)測系統(tǒng)�。
關(guān)鍵詞:數(shù)控機(jī)床 狀態(tài)監(jiān)測 故障預(yù)測 工作流程 結(jié)構(gòu)體系
大型數(shù)控機(jī)床系統(tǒng)的性能及可靠性決定了其工作壽命以及工作效率,目前的事后維修和計(jì)劃性維修很難預(yù)防災(zāi)難性的故障����,而且常常引起不必要的停機(jī),存在引入維修損壞的風(fēng)險����。與以上兩種維修策 略 不 同 , 視 情 維 修 (CBM, condition basedmaintenance)是面向設(shè)備實(shí)際狀態(tài)和發(fā)展趨勢的����,根據(jù)對設(shè)備當(dāng)前和將來狀態(tài)的正確和可靠的預(yù)測來安排維修活動��。因此對設(shè)備當(dāng)前狀態(tài)的描述�����,以及對下一時段狀態(tài)和故障的預(yù)測是實(shí)現(xiàn)視情維修的根本�����,這也正是狀態(tài)監(jiān)測和故障預(yù)測技術(shù)要著力解決的問題。狀態(tài)監(jiān)測和故障預(yù)測技術(shù)使得設(shè)備維護(hù)人員可以預(yù)知故障的發(fā)生����,從而采取一系列維修或預(yù)防的措施,而不必等到故障真正發(fā)生之后再做出反應(yīng)�����。
目前�����,數(shù)控機(jī)床正朝著大型化�����、高速化、高精度化的方向發(fā)展���。在高速���、高加速度、大載荷���、大位移等非常規(guī)工況下��,振動����、沖擊�����、變形等因素對機(jī)床的進(jìn)給系統(tǒng)產(chǎn)生重大影響�,導(dǎo)致絲杠、導(dǎo)軌�、軸承、聯(lián)軸器���、齒輪�、蝸輪蝸桿等機(jī)械部件產(chǎn)生各種故障,由此引起數(shù)控機(jī)床的運(yùn)動誤差�����、部件磨損甚至意外停機(jī)等問題��。因此�����,在狀態(tài)監(jiān)測和故障診斷領(lǐng)域內(nèi)�,正確評價大型數(shù)控機(jī)床當(dāng)前的狀態(tài)���,預(yù)測機(jī)床運(yùn)行狀態(tài)的發(fā)展趨勢��,為機(jī)床維護(hù)提供指導(dǎo)依據(jù)是一個亟待解決的問題����。
1�、數(shù)控機(jī)床狀態(tài)監(jiān)測和故障預(yù)測的組成及功能
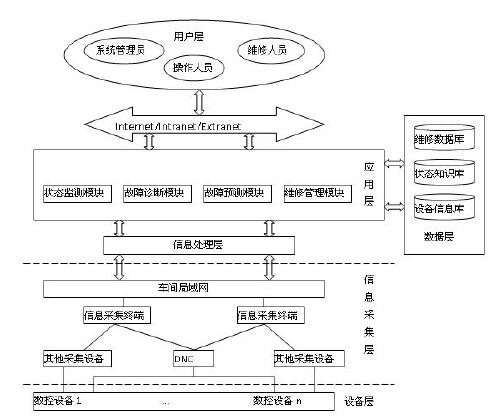
通過在線檢測設(shè)備運(yùn)行狀態(tài),參照設(shè)備正常的狀態(tài)參數(shù)標(biāo)準(zhǔn)�,結(jié)合歷史維修知識庫,對設(shè)備的運(yùn)行狀態(tài)進(jìn)行分析��,并對故障可能發(fā)生的情況進(jìn)行預(yù)測,從而作為制定設(shè)備合理維修計(jì)劃的依據(jù)����。通過對運(yùn)行狀態(tài)進(jìn)行監(jiān)測,如果發(fā)現(xiàn)設(shè)備出現(xiàn)了故障�,則立即進(jìn)行診斷,確定故障部位和故障類型�,提出維修建議,進(jìn)而下達(dá)維修任務(wù)和組織實(shí)施���。其體系結(jié)構(gòu)如圖1所示�。
(1)設(shè)備層:由作業(yè)車間中數(shù)控加工設(shè)備構(gòu)成�。
(2)信息采集層:其主要作用是采集設(shè)備層的運(yùn)行狀態(tài)數(shù)據(jù),并對這些數(shù)據(jù)進(jìn)行濾波��、整形��、放大等處理后�����,提交給信息處理層���。該層主要包括各類傳感器�、信息采集終端、直接數(shù)字控制(DirectNumerical Control���,DNC)�����,以及其他智能設(shè)備等����。
(3)信息處理層:該層的功能是對信息采集層提交的信息進(jìn)行識別���、轉(zhuǎn)化����、分類�����、融合��、特征提取��、特征融合等���,為應(yīng)用層的功能實(shí)現(xiàn)提供支撐�����。
(4)數(shù)據(jù)層:由維修數(shù)據(jù)庫�����、狀態(tài)知識庫和設(shè)備信息庫等相關(guān)數(shù)據(jù)庫及知識庫構(gòu)成���。維修數(shù)據(jù)庫存儲維修內(nèi)容、維修操作�、維修計(jì)劃、維修事件等相關(guān)數(shù)據(jù)信息���;狀態(tài)知識庫存儲設(shè)備在不同工況下運(yùn)行的狀態(tài)參考值����、允許值和故障閾值等�。
(5)應(yīng)用層:由在線監(jiān)控模塊、故障診斷模塊����、故障預(yù)測模塊和維修管理模塊組成�����。在線監(jiān)控模塊實(shí)時獲取設(shè)備運(yùn)行狀態(tài)數(shù)據(jù)���,在對其進(jìn)行處理后,進(jìn)行數(shù)據(jù)融合��,向用戶顯示設(shè)備運(yùn)行狀態(tài)�,并將融合后的數(shù)據(jù)提交給故障診斷模塊;故障診斷模塊在監(jiān)控模塊提供監(jiān)控數(shù)據(jù)的基礎(chǔ)上進(jìn)行特征提取��,并對特征值進(jìn)行融合��,進(jìn)而通過各種特征分類器進(jìn)行分類�����,在進(jìn)行數(shù)據(jù)的決策層融合后進(jìn)行故障診斷���,并輸出故障結(jié)果;故障預(yù)測模塊根據(jù)相關(guān)模型和算法對設(shè)備運(yùn)行狀態(tài)特征進(jìn)行故障預(yù)測��,并對可能的故障部件�、故障原因�����、故障類型等進(jìn)行分析�;維修管理模塊主要處理與設(shè)備維修相關(guān)的操作管理�����,包括維修內(nèi)容管理�、維修計(jì)劃管理、維修事件管理��、維修控制等�����。
(6)用戶層:該層的用戶分為系統(tǒng)管理員�����、操作人員和維修人員三類�。
需要指出的是,上述體系結(jié)構(gòu)中的各功能模塊之間并沒有明顯的界限����,存在著數(shù)據(jù)信息的交叉反饋��。國外對上述各模塊中應(yīng)用的一般技術(shù)(如傳感器�、數(shù)據(jù)傳輸����、數(shù)據(jù)處理等)和方法(如系統(tǒng)框架模型、狀態(tài)監(jiān)測和預(yù)測推理算法等)進(jìn)行了大量的研究���,同時也進(jìn)行了大量的工程實(shí)踐�。
圖 1 數(shù)控機(jī)床的狀態(tài)監(jiān)測和故障預(yù)測的結(jié)構(gòu)體系
2 �����、數(shù)控機(jī)床狀態(tài)監(jiān)測和故障預(yù)測的工作流程
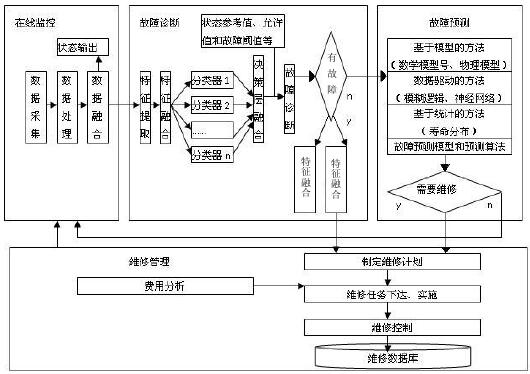
數(shù)控機(jī)床狀態(tài)監(jiān)測和故障預(yù)測系統(tǒng)包括兩種工作流程:
(1)設(shè)備運(yùn)行狀態(tài)信息采集和故障診斷���、預(yù)測流程�;(2)設(shè)備維修管理流程���,如圖 2 所示����。
具體操作可劃分為四個階段�。
圖 2 數(shù)控機(jī)床的狀態(tài)監(jiān)測和故障預(yù)測工作流程
2.1 設(shè)備可監(jiān)測的運(yùn)行狀態(tài)信息分析
(1)設(shè)備運(yùn)行狀態(tài)實(shí)時采集與監(jiān)控,通過對設(shè)備可監(jiān)測的運(yùn)行狀態(tài)信息進(jìn)行分析���,選擇最佳的狀態(tài)監(jiān)測方法�����,確定所需的儀器和設(shè)備�,進(jìn)行設(shè)備運(yùn)行狀態(tài)數(shù)據(jù)的采集����。
(2)由于設(shè)備運(yùn)行狀態(tài)的輸出大都為非線性,同時受溫度�、電源波動、噪聲和振動等環(huán)境因素的影響,使得所采集的數(shù)據(jù)不能準(zhǔn)確地反映測量值����,容易出現(xiàn)測量準(zhǔn)確度不高��、穩(wěn)定性差等問題�。因此,需要對采集到的數(shù)據(jù)進(jìn)行處理�,剔除錯誤數(shù)據(jù)或偏差數(shù)據(jù)����。
(3)對多源同類傳感器進(jìn)行一次數(shù)據(jù)融合����,然后對異類傳感器進(jìn)行二次數(shù)據(jù)融合,以提高獲取狀態(tài)信息的準(zhǔn)確性�。同時,根據(jù)融合后的數(shù)據(jù)輸出設(shè)備的運(yùn)行狀態(tài)信息�。
2.2 基于融合后的設(shè)備運(yùn)行狀態(tài)信息進(jìn)行故障診斷
(1)由于實(shí)時采集的設(shè)備運(yùn)行狀態(tài)信息的數(shù)據(jù)量相當(dāng)巨大,為了對設(shè)備運(yùn)行狀態(tài)進(jìn)行分析和診斷����,需要根據(jù)融合后的運(yùn)行狀態(tài)數(shù)據(jù),提取設(shè)備運(yùn)行的關(guān)鍵特征����,構(gòu)建設(shè)備運(yùn)行狀態(tài)的特征向量。
(2)根據(jù)信息融合理論進(jìn)行設(shè)備運(yùn)行狀態(tài)的特征融合���。
(3)構(gòu)造特征分類器��,進(jìn)行決策層融合�����。同時��,參考設(shè)備運(yùn)行狀態(tài)參考值��、允許值和故障閾值����,進(jìn)行故障診斷����,并輸出診斷結(jié)果。如果診斷結(jié)果是有故障���,則進(jìn)行故障報警��,并輸出故障信息����,同時進(jìn)入維修管理��;如果診斷結(jié)果是無故障����,則進(jìn)入故障預(yù)測階段�。
2.3 故障預(yù)測
雖然故障診斷的結(jié)果是未發(fā)生故障�,但設(shè)備存在發(fā)生故障的可能性。故障預(yù)測的目的就是分析這種可能性的大小�����,并做出是否需要進(jìn)行維修的判斷���。預(yù)測的方法有基于模型的方法��、大數(shù)據(jù)驅(qū)動的方法和基于統(tǒng)計(jì)的方法三種���。經(jīng)過預(yù)測后,如果判定為不必進(jìn)行維修��,則返回設(shè)備運(yùn)行狀態(tài)實(shí)時采集與監(jiān)控����;如果判定為需要進(jìn)行維修,則進(jìn)入維修管理���。
2.4 維修管理
(1)如果設(shè)備需要進(jìn)行維修���,則查詢相關(guān)維修數(shù)據(jù)庫�,制定維修計(jì)劃�����。
(2)對維修計(jì)劃進(jìn)行費(fèi)用分析��,并生成維修任務(wù)�。該步驟由相關(guān)人員組織實(shí)施���。
(3)對維修任務(wù)進(jìn)行控制���,維修任務(wù)完成后,把相關(guān)維修信息輸入維修數(shù)據(jù)庫�����。
3�、 數(shù)控機(jī)床狀態(tài)監(jiān)測和故障預(yù)測的結(jié)構(gòu)體系
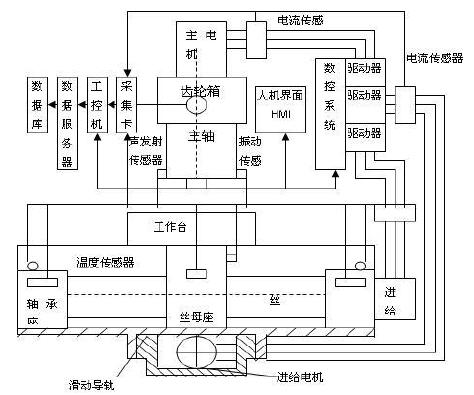
針對監(jiān)測對象的特點(diǎn),選擇不同的傳感器對各個部件的運(yùn)行狀態(tài)進(jìn)行監(jiān)控��,具體結(jié)構(gòu)如圖 3 所示��。
圖 3 數(shù)控機(jī)床的狀態(tài)監(jiān)測和故障預(yù)測結(jié)構(gòu)體系
1)數(shù)控系統(tǒng)
數(shù)控系統(tǒng)運(yùn)行參數(shù)可以通過軟件直接讀取���,系統(tǒng)故障代碼顯示各種報警信息��。有故障特征融合特征融合
2)導(dǎo)軌副
X 向�����、Y 向和 Z 向?qū)к壊捎没瑒訉?dǎo)軌��,機(jī)油潤滑��,在滑動體上安裝三向振動傳感器監(jiān)測導(dǎo)軌的變形及磨損���。
3)絲杠副
由于設(shè)備運(yùn)動部件的性能及精度變化主要反映在振動頻率及幅值的變化上��,在 X 向�、Y 向及 Z 向滾珠絲杠副的絲母座上分別安裝 1 個三向振動傳感器��,監(jiān)測絲杠由于磨損�、偏心、絲杠滾道表面缺陷���、滾珠缺陷等導(dǎo)致的振動及沖擊脈沖�����。絲杠兩側(cè)的支撐端分別安裝 1 個單向振動傳感器���,監(jiān)測由于絲杠彎曲�����、前后支架不同心��、軸承故障等導(dǎo)致的振動形態(tài)變化����。為提高故障預(yù)警和診斷的精度��,在絲母座及兩個軸承座上分別安裝 1 個貼片式溫度傳感器�����,監(jiān)測性能變化導(dǎo)致的溫度增加�。
4)主軸系統(tǒng)
主軸系統(tǒng)由電機(jī)��、齒輪箱和主軸構(gòu)成��。在主軸前端安裝聲發(fā)射傳感器和振動傳感器,在齒輪箱上安裝振動傳感器��,監(jiān)測主軸的運(yùn)動精度���、軸承狀態(tài)及齒輪嚙合狀態(tài)��。
5)伺服系統(tǒng)
采用 3 個電流傳感器分別監(jiān)測主軸電機(jī)和 2 個給電機(jī)的實(shí)際負(fù)載狀況及功率變化�,通過切削力實(shí)驗(yàn)�����,對電流信號進(jìn)一步分析處理�����,可以建立電流與負(fù)載力之間的映射關(guān)系���。驅(qū)動器故障由其內(nèi)部報警代碼提供解決方案���。
6)潤滑系統(tǒng)監(jiān)測
潤滑系統(tǒng)的壓力及流量分別采用壓力傳感器和流量傳感器實(shí)時監(jiān)測,油箱機(jī)油溫度和液位高度采用溫度傳感器和液位傳感器獲取���,防止異常狀況和漏油的發(fā)生��。
7)電氣控制系統(tǒng)
采用可編程控制器 ( programmable logiccontroller ,PLC)直讀技術(shù)獲取 PLC 點(diǎn)位信息�����,構(gòu)成狀態(tài)矩陣����,并采用圖形化方式將電氣原理圖進(jìn)行對照輸出,以便快速診斷和維修故障���。上述傳感器信號通過模 / 數(shù)(analogue/digital,A/D)采集卡轉(zhuǎn)換后輸入工控機(jī)進(jìn)行分析與計(jì)算�����,分析獲得的設(shè)備狀態(tài)監(jiān)測數(shù)據(jù)送入數(shù)據(jù)服務(wù)器存儲��,并同時在設(shè)備的人機(jī)界面 HMI上實(shí)時滾動顯示,以便于操作人員掌握設(shè)備各個部件的運(yùn)行及狀態(tài)信息�����。
4����、 結(jié)語
雖然各種數(shù)控設(shè)備狀態(tài)監(jiān)測與故障診斷系統(tǒng)已逐步得到應(yīng)用,但還遠(yuǎn)沒有達(dá)到工程實(shí)用化的程度。目前還僅在部分關(guān)鍵的系統(tǒng)和部件中應(yīng)用����。并且對大多數(shù)系統(tǒng)尤其是數(shù)控設(shè)備的故障機(jī)理了解還不深入,有些還僅是故障的檢測�,還不具備故障預(yù)測的能力。此外��,何正確有效地預(yù)測系統(tǒng)的狀態(tài)�,并做出優(yōu)化的維修決策等都需要大量的研究工作。難點(diǎn)工作主要在于如何規(guī)劃特定被監(jiān)測系統(tǒng)的系統(tǒng)體系結(jié)構(gòu)���,如何有效地選用一些較成熟的技術(shù)用于構(gòu)建狀態(tài)監(jiān)測與故障預(yù)測系統(tǒng)��。應(yīng)首要確定需要進(jìn)行研究的關(guān)鍵技術(shù)(如對于數(shù)控設(shè)備關(guān)注故障機(jī)理的基礎(chǔ)性研究)�,進(jìn)而開發(fā)出適合我國國情的狀態(tài)監(jiān)測與故障預(yù)測系統(tǒng)�����。

.png)
